Третя версія платформи. Перша. Друга.
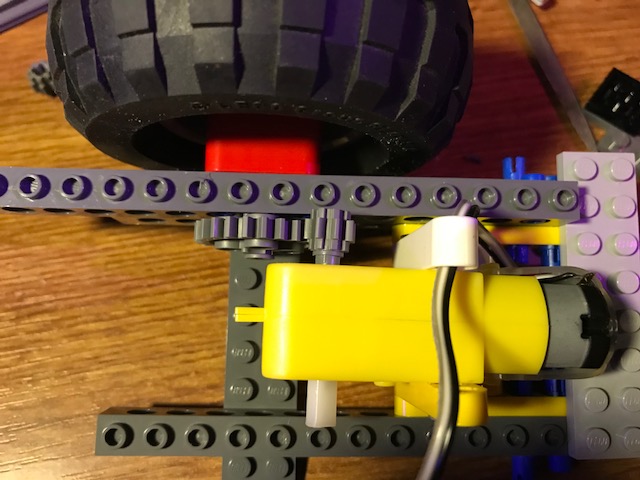
Переробка двигунів на нову шестерню зайняла 2.5 години. Вирішив піти по попередньому шляху – розточуючи отвір шестерні. Вона маленька. Втримати в пальцях дуже важко. Через годину пиляння вирішив підточити трішечки вал редуктора. Через ще годину зрозумів, що роблю дурну роботу – шестерня все ще не налазила, а пальці вже ледь тримали. Розібрав редуктор. На металеву вісь насаджений пластиковий вал. Зняв пластик. Відрізав від лєговської хрестообразної осі шматор та насадив на вал. На все 5 хвилин. Другий мотор навіть не розбирав. Враховуючи, що почав я збирати третю версію робоплатформи десь о 21.30 то була вже десь північ.
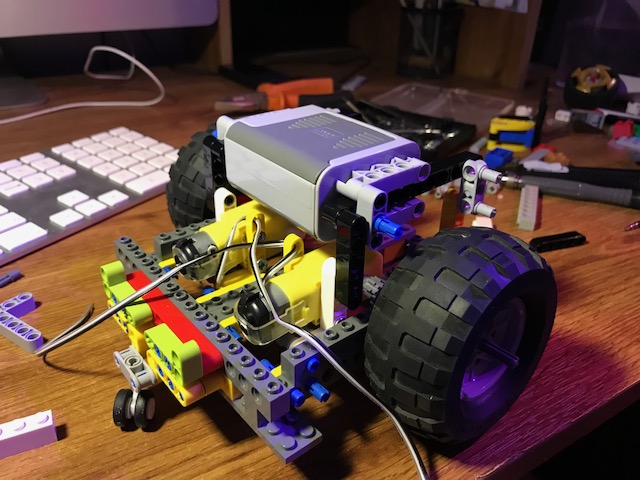
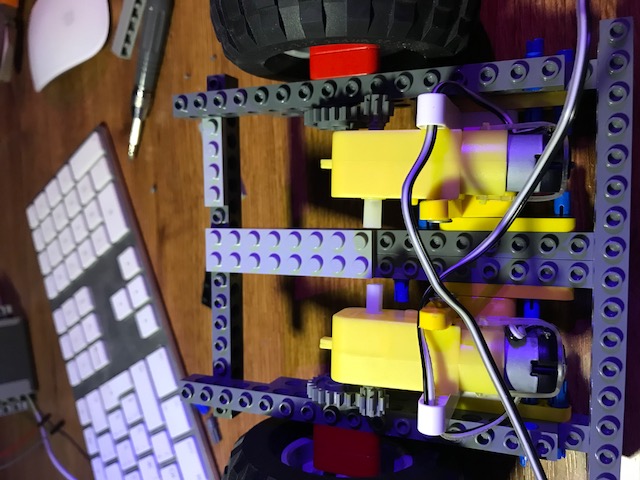
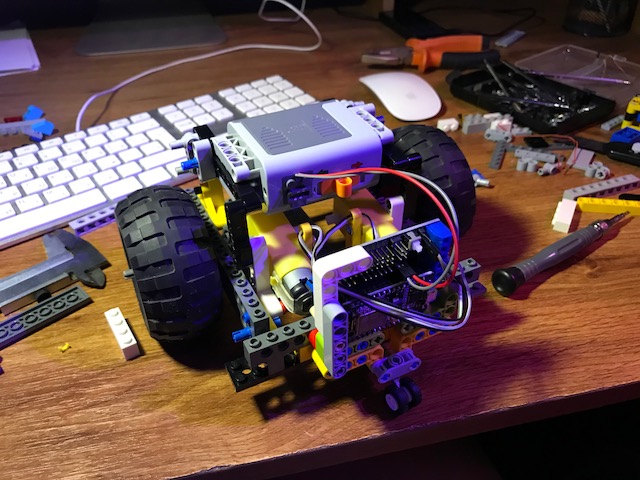
Зібрав раму. Без всяких “підвісок” та “амортизаторів”.
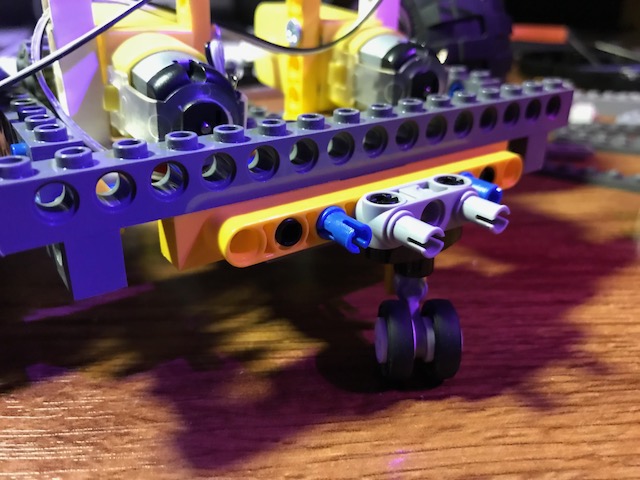
Ну і щоб не повзати – коліщатко-підпірка. Доречі, можна буде потім баланс-робота спробувати. На майбутнє.
Батарейний блок можна пересовувати – змінюючи центр ваги системи.
Ну.. Поїхали.
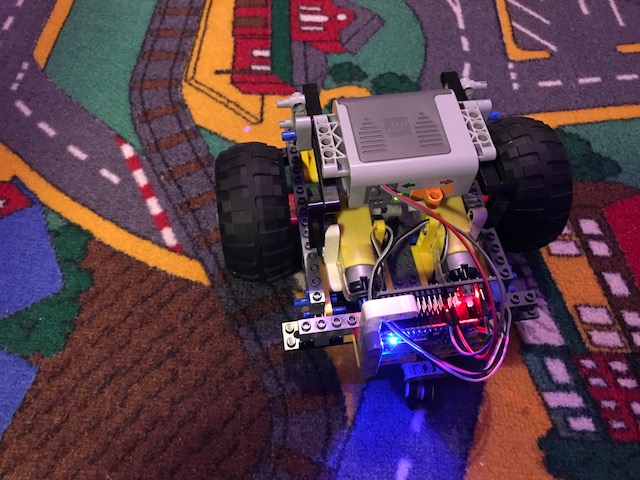
“Щось пішло не так”. Але він ПОВЕРТАЄ!. Насправді – це команда їхати вперед. Просто переплутана полярність проводів мотора.
Воно їздить. Повертає. Розвертається.
Перша ночі. Треба спати. Далі будє.
КотСтруктор