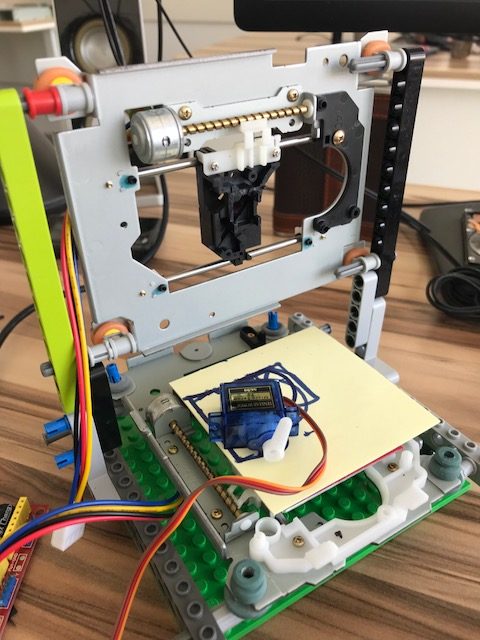
Перша ревізія ЧПК станка. Із гімна і палок.
Два розібрані CD/DVD приводи. Залишено тільки направляючі, шагові мотори та кріплення всього цього.
Базова плата для ЧПК – “Keyestudio щит с ЧПУ V4.0 доска совместим с Arduino Nano” (C) Аліекспресівський.
Згідно мануалу на драйвера шаговиків Pololu DRV8825 – для використання мікрошагів треба притягнуть ноги обирання ділення (1/2, 1/4, 1/8, 1/16 та 1/32) шагу до +5В. так як вони мають внутрішні резистори 100КОм які притягують іх до ЗЕМЛІ.
“The resolution (step size) selector inputs (MODE0, MODE1, and MODE2) enable selection from the six step resolutions according to the table below. All three selector inputs have internal 100kΩ pull-down resistors, so leaving these three microstep selection pins disconnected results in full-step mode. ”
Криворукі китайці розвели плату так, що ці ноги режимів перемичками замикаються на …. тадам.. ЗЕМЛЮ.. а та як вони вже і так на землі через 100КОм – то до дупи ті перемикання – мотори працюють в повний шаг завжди.. Прийшлоcя навішувати “соплю” з +5 ноги на всі 3 селектори.

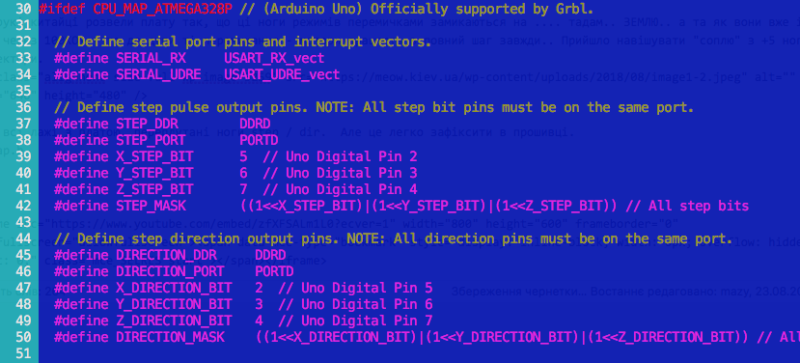
Це не всі лажі з платою. переплутані ноги step / dir. Але це легко зафіксити в прошивці.
cpu_map.h:
Також підфікшений spindle_control.c (під https://github.com/gnea/grbl/releases/tag/v1.1f.20170801 ) для керування сєрвою замість шпінделя. spindle_control.c
П.С. PWM нога керування сервою / шпінделем – розведена на лімітер вісі Z. ( Але про це описано в документації на GRBL ).
Руки до сєрвопривода ще не дішли, щоб він піднімав/опускав інструмент.
Поки що приматав фломайстер лєйкопластирем до карєтки – намалював перше криве коло. Фломайстер не тримається рівно.. Та і площини X,Y,Z далеко не перпендикулярні.. АЛЕ ВОНО ПРАЦЮЄ! (Не ВОНА!)
Далі буде