Все почалося з того, що збирати просто Лєго набридло. Вирішили зробити свого робота.
Базове шассі швиденько накидали з рештків якогось всюдихіда.
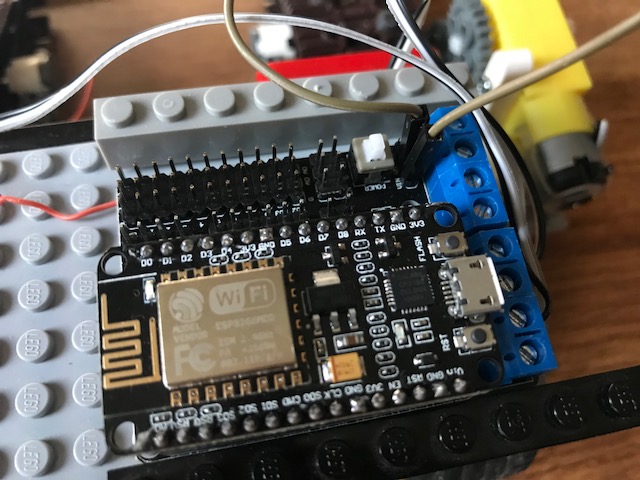
Платформа – Моторшилд для Nodemcu ESP8266 на драйвері L293D для керування двома моторами постійного струму.
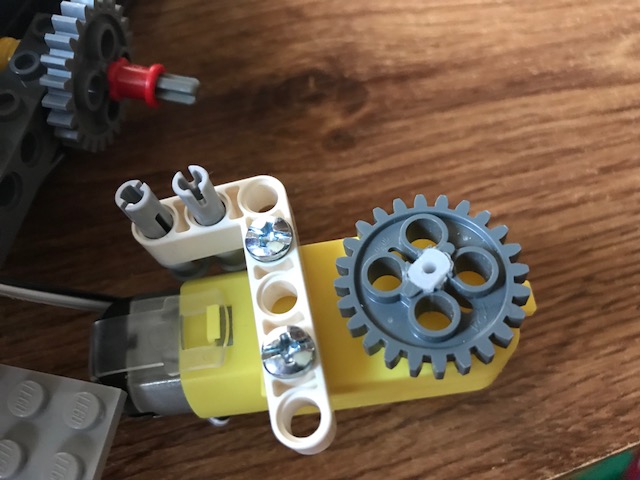
Мотори – прості на ібеї валом https://ebay.to/2Pcvgur
Трішечки пововтузитися з надфілем і лєго шестерня налазить як рідна.
Тестування Servo.
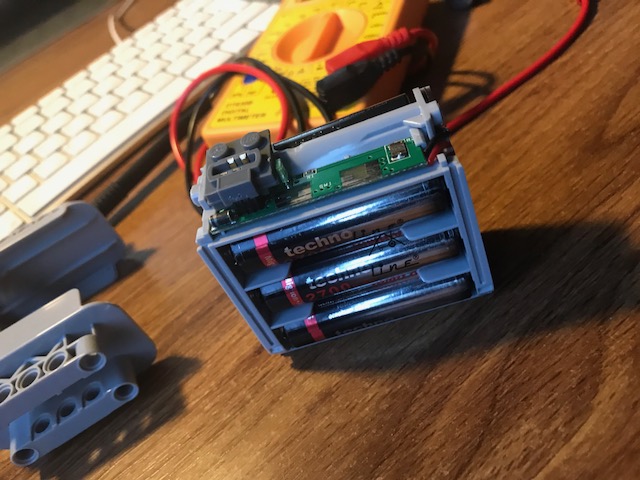
Також перші випробування показали, що живлення 5в від павербанку (2А вихід) моторам не вистачає на поворот.
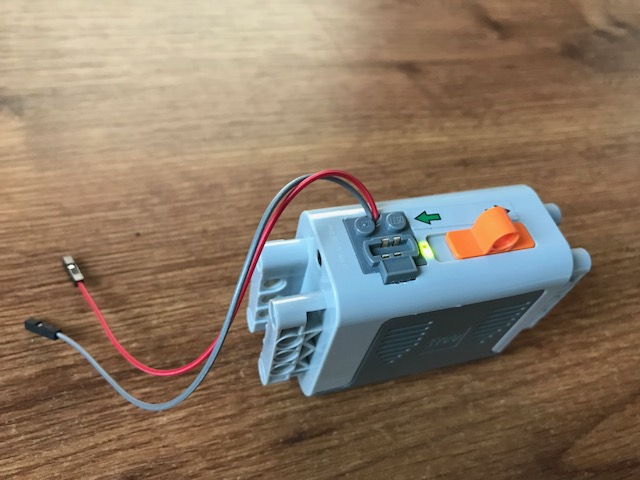
Тому бів розколупаний лєговський блок на 9В і додано виводи.
Перші “стендові” випробовування на столі з БП 12В – робот “зірвався” шо скажений пес, порвав провода, гепнувсь зі столу.
Робот приєднується до WiFi, керується через бровзер по http.
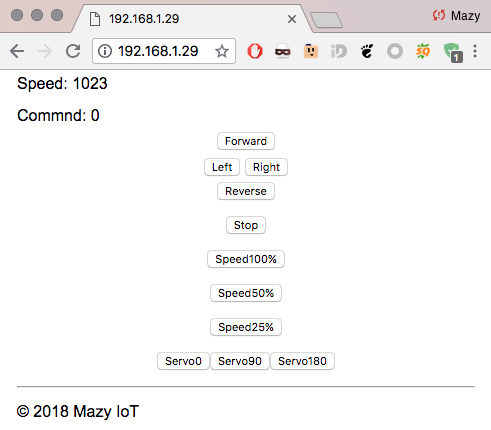
Код простий як дрова. Для першого тесту – підійде. Надалі на сєрві планується встановити ультразвуковий сонар та додати роботу трішечки автономності.
Перші “польові” випробування на 9В батареї.
Гусені дуже пагано розвертають тушку. Треба перероблювати платформу на колеса.
Далі буде